IN THIS ARTICLE
Joints Manipulation
Overview
Manipulating joints is crucial for applications involving robotic arms or other joint systems such as legged locomotion. O3DE supports control of joint systems with ROS through packages such as ros2_controllers , and through integration with MoveIt2 .
Note:The manipulation functionality is available in theROS2ControllersGem.
Supported features
With manipulation components, you can:
- Publish JointState ROS messages automatically with JointsManipulationComponent.
- Control joint systems through FollowJointTrajectory ROS action.
- Control systems based on articulations as well as hinge and prismatic joints.
- Extend interfaces for developers to implement your own control components through JointsManipulationRequests and JointsPositionControllerRequests.
- Use manipulation components in multi-robot scenarios.
Limitations
Manipulation components only work with single degree of freedom joints.
Components and their interactions
Movement of joints is handled through a set of interfaces and components that implement them.
| Interface | Components | Role |
|---|---|---|
| JointsPositionControllerRequests | JointsArticulationControllerComponent JointsPIDControllerComponent | Move joints towards desired positions. |
| JointsManipulationRequests | JointsManipulationComponent | Hold and publish joints state information, relay commands to controllers. |
| JointsTrajectoryRequests | JointsTrajectoryComponent | Host action server for trajectory commands, control trajectory through a sequence of positions. |
Simulating joint systems
Start quickly with Manipulation Template
If your goal is to simulate a robotic arm, the quickest way to start is to create a project from Manipulation Template.
If you followed the steps of
project configuration, your environment variables for O3DE_HOME and PROJECT_PATH will be set, and the templates registered.
Create a new project with the following command:
${O3DE_HOME}/scripts/o3de.sh create-project --project-path $PROJECT_PATH --template-name Ros2RoboticManipulationTemplate
The template comes with a couple of examples which you can run following its README .
Configure your robot
Import the robot
Once your project is up, use the
robot import feature to load your robot of choice into O3DE.
Make sure that the checkbox Use articulation for joints and rigid bodies is checked on the last page of the importer.
Using articulations is strongly recommended for stable simulation of robotic arms and other joint systems.
Add necessary components
If the import proceeded without issues, open the root entity of your newly created prefab and add three new components:
JointsArticulationControllerComponentto control the robot`s movement.JointsTrajectoryComponentto listen for the MoveIt trajectory messages.JointsManipulationEditorComponentwhich publishesjoint_statesand sets the initial position.
Enable motors in joints
Enable motors on all joints and set motor force limit, stiffness and damping values. Joints with motors enabled will keep their
set position.
Set initial positions and topic name
- In the
JointsManipulationEditorComponent, add initial positions for all joints. Joint names can be found in the prefabs entities inside theROS2FrameComponentjoint name. The initial positions are in radians. - In the
JointsTrajectoryComponent, set the topic for controlling the trajectory. Typically, this topic name ends withjoint_trajectory_controller, but should be same as in your MoveIt configuration files.
Start the simulation
Start the simulation and see as the robot sets itself into its initial position. If something is not right, check the O3DE console for logs, which include all joint names. The robot is now ready for being controlled using MoveIt.
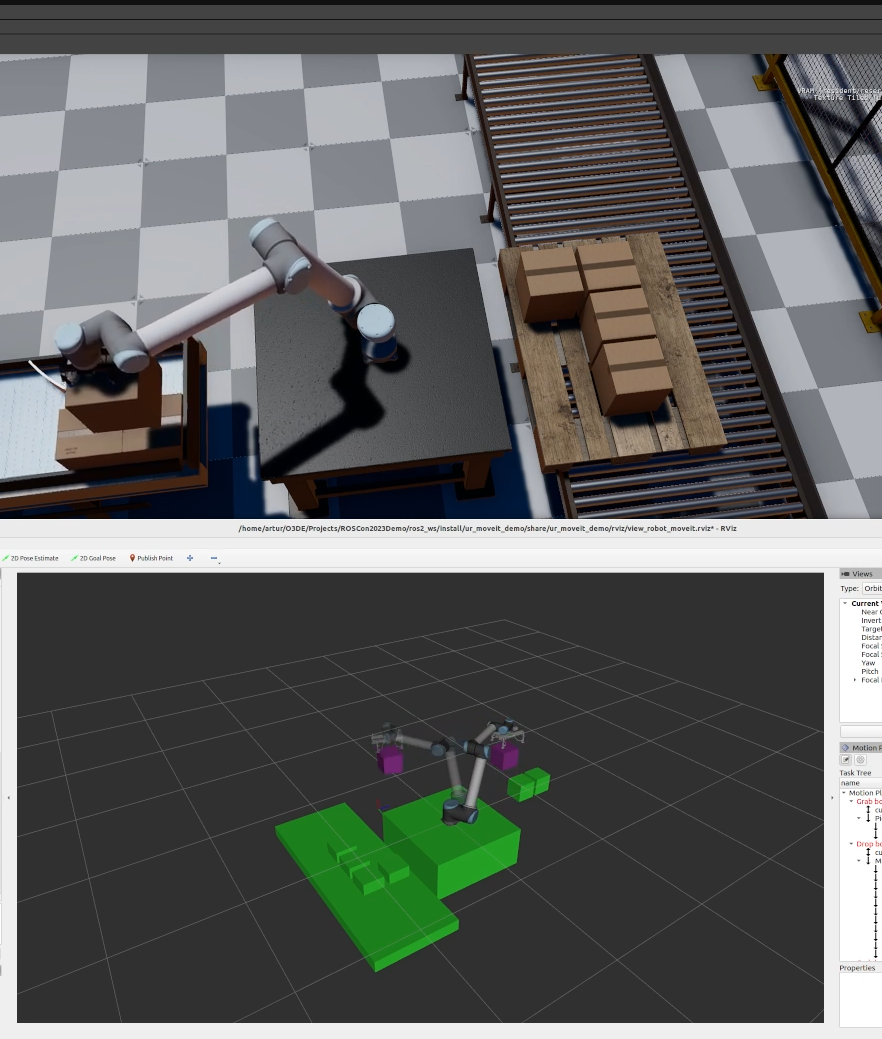
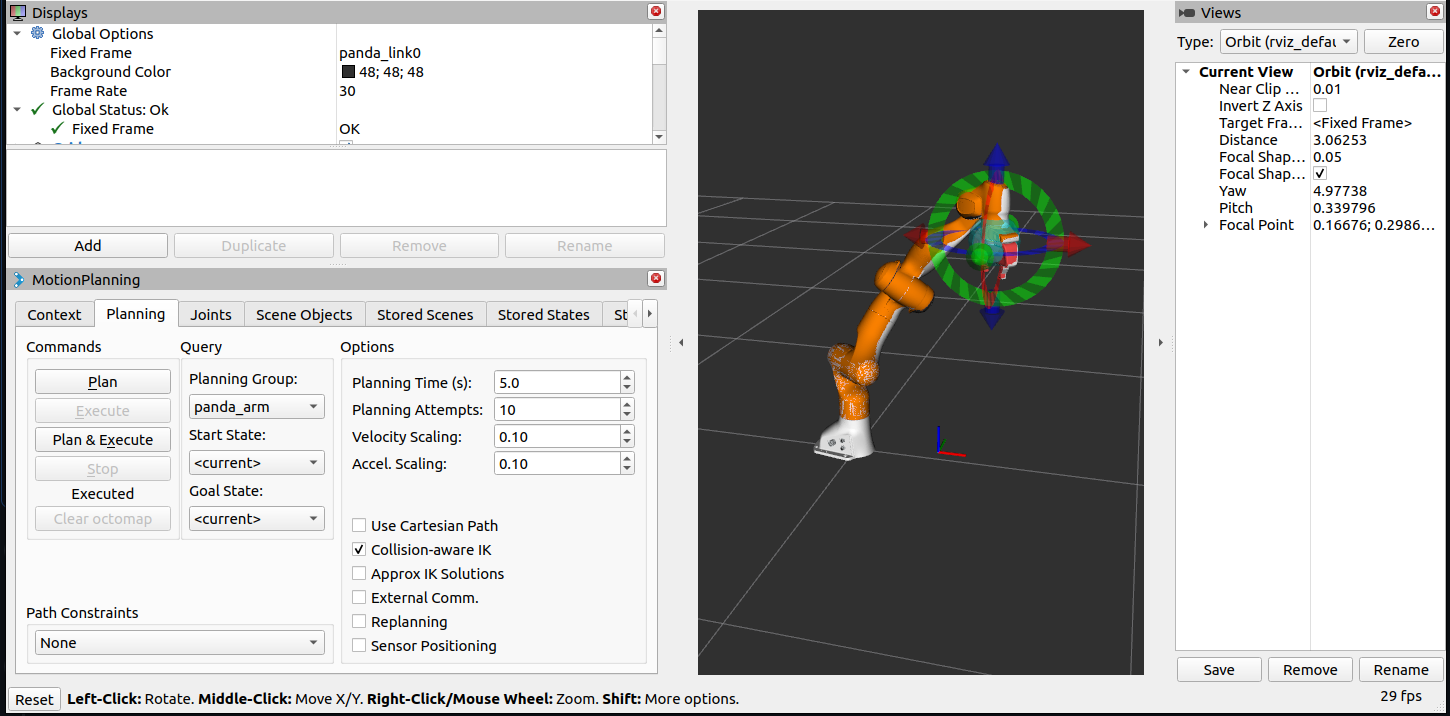
Running with MoveIt2
Install moveIt packages for your ROS distribution:
sudo apt install ros-${ROS_DISTRO}-moveit ros-${ROS_DISTRO}-moveit-resources
Following that, prepare MoveIt launch files. This can be achieved by creating the files manually, using configuration provided with your robot, or using the MoveIt Setup Assistant .
You can see two examples in the Manipulation Template .
Finally, run the launch file and control your simulated joint system with MoveIt.
Related topics
| Topic | Description |
|---|---|
| Grippers | Simulating robotic grippers in O3DE |